This week @Dukes and I met up to do some remote radar detector testing. We had at least two of all the top remote RD’s and tested them on 33.8, 34.7, 35.5, and K band. We also used two different courses over three days so it was a LOT of time spent testing. 🙂 It’s a test I’ve been wanting to do for a while now so a big THANK YOU to everyone who contributed equipment and helped make this test happen!
Radar Detectors:
-Stinger VIP 4.0.26 (@Dukes)
-Stinger VIP 4.0.26 (@Vortex, supplied by Stinger HQ)
-Net Radar 1 (@Vortex, supplied by @BestRadarDetectors, hand-soldered preproduction unit)
-Net Radar 2 (@Vortex, supplied by @BestRadarDetectors, production unit)
-Radenso HD+ connected to Bel 975 (@Vortex, supplied by @Hügel66)
-Radenso HD+ (supplied by @inbe2893)
-9500ci (@Dukes, standalone unit)
-STi-R Plus (@mikedotd, standalone unit)
-STi-R O (@Dukes, head plugged into Plus CPU)
Every detector was running the latest public firmware, including the Stinger with the new 4.0.26 that was just released a few days ago. (Great timing!)
Let’s take a look at all the detectors mounted on @Dukes‘ truck which is amazing for remote testing…

Radar Guns:
33.8: MPH Bee III (@Vortex)
34.7: Stalker II (@Vortex)
35.5: Decatur Genesis II Select (@ykobzar2)
K Band: Decatur Genesis II Select (@ykobzar2)
Test Course 1:
The first course we used was the same one I’ve used in previous tests. It’s worked great before, but the past few times I’ve used it, including this week, I didn’t see any separation between detectors. Most every detector maxed out the course and alerted within a few feet of one another. I really want separation between detectors, but at the same time, I think it’s great to point out that every detector here can do an excellent job even in challenging conditions. We tested the Stinger, 9500ci, and Net Radar for comparison purposes. When I tried making things a little tougher for the detectors, they all still alerted right around at the same points. We tried switching radar guns to see if things varied between frequencies and things were all still similar… at least until we got to K band.
The Stinger was doing great at first and then started to turn in terrible detections. Alert distances dropped from 2700 feet (maxing out the course) to just 200-400 feet (the kill zone), sometimes even not going off at all even as we drove past the radar gun. Crazy… Clearly something was wrong. When we got home, we contacted Stinger, talked to them on the phone for a good half hour, and sent them logs from the detector so that they could see what was going on. They said it sounded like an issue with starting up the detector near a strong radar source which was triggering the in-car BSM filter. The detector can filter out false alerts if your own car has a BSM system and even though we had that filter turned off, there was an issue with filtering out signals if you start near a strong signal, drive away from it, and then turn around and drive back towards it. It’s not something you’d encounter much in practice, but it was a bug nonetheless that impacted our testing. Armed with the information and logs we sent them which lets them see exactly what was going on and why, they worked on a firmware update while we slept (they’re overseas in the Netherlands), and in the morning they sent us an updated beta firmware with a fix for the bug. We tested it out and it looks like it fixed that issue! That’s AMAZING service and I’m truly impressed by the VIP’s logging capabilities and what their engineers can do with it… This firmware, 4.0.32, has since been made available. I don’t know if performance with .32 is any better than .26 we tested with, but Stinger did confirm that it shouldn’t be worse.
Anyways, the next day we went off to another test course and here’s where I’m gonna start sharing the results.
Test Course 2:
This test course was about 2,000 feet long. It’s a tree-filled road with a hill to climb up and a radar gun hiding right around a bend.

and here’s a quick video of us driving the test course at the start so you can see it as well. At the end you’ll also see the radar guns we tested with. 😉
Initially we had the radar guns in my car but every detector was maxing out the course. To fix this, we put the radar guns antennas on a tripod, the counting units in a protective waterproof box, and moved them farther back behind the bend.

Now for the results. 🙂
34.7:
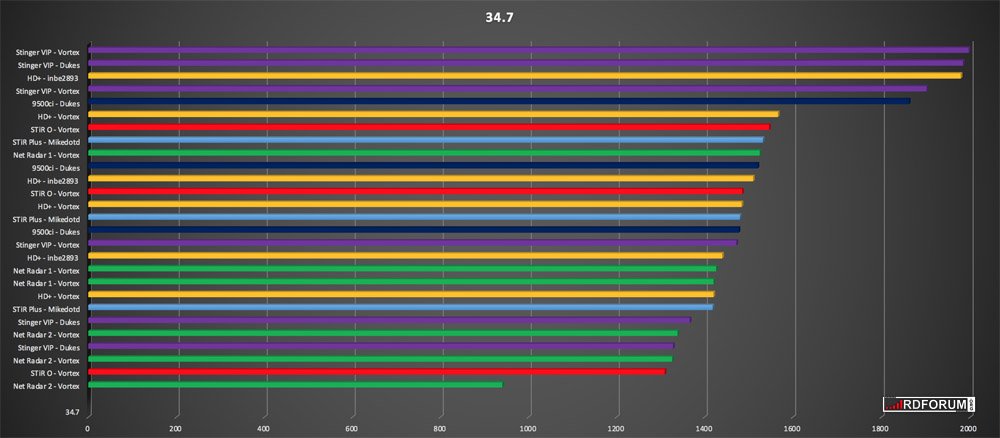
34.7 we ran first and it got me really excited. The Stinger VIP, HD+, and 9500ci managed to alert right around the start of the course where we were seeing fringe detections. Not every detector could alert there or even do it every time, but it was a weak signal enough to max out the course.
Generally detectors would alert as we were cresting the hill or driving on top of it.
Sometimes detectors would have a not so great run. You’ll see some from the Stinger, O, and Net Radar, for example. I don’t know why this occurred. It wasn’t due to traffic which was our initial guess. Traffic was minimal but runs like this would happen with and without traffic so it’s not due to that. We ran each detector 3 times to account for run-to-run variance and you’ll see all 3 runs posted above.
33.8:
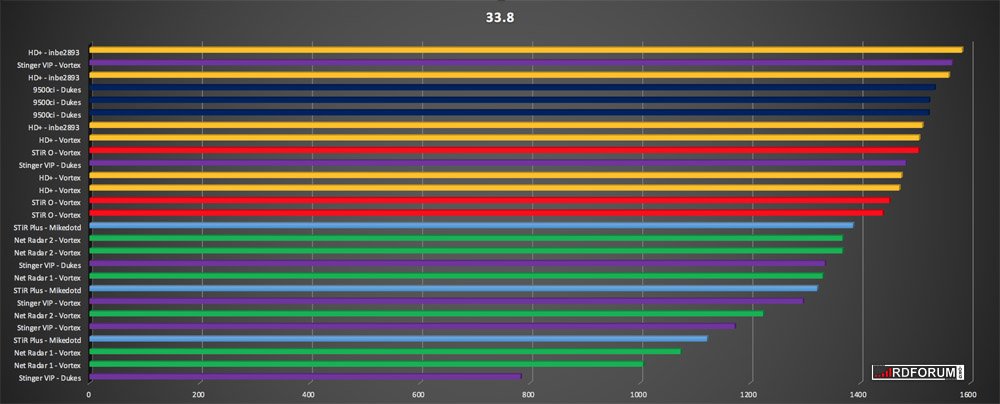
33.8 was next. No detectors managed to max out the course with those fringe detections this time, but we had a strong showing by the wirebonded M3’s and HD+. The Stinger managed to get some really strong runs, as well as a number of less strong ones. It also had one surprisingly short run. Not sure what’s up with that. The STi-R Plus and Net Radar were a bit under the top dogs, but this is some stiff and even the shorter runs provided plenty of time for a save.
35.5:
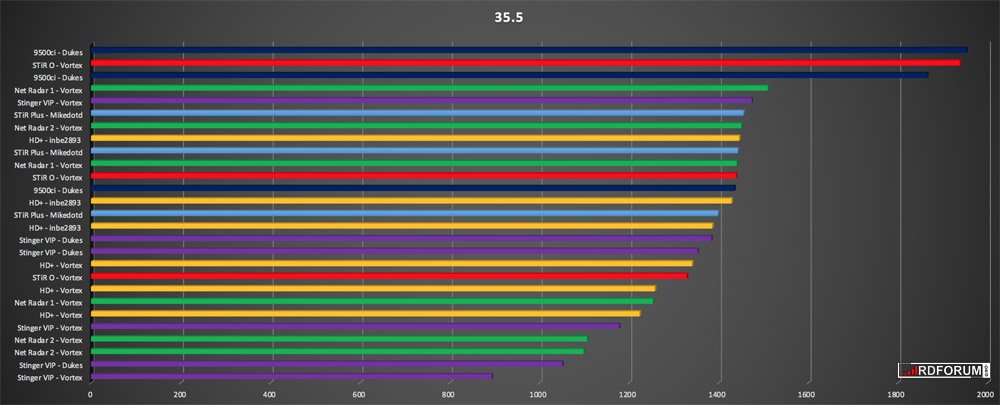
On 35.5, the wirebonded M3’s again stole the show. Just past the fringe detection areas though, every detector was able to alert driving up the hill or as we crested it and turn in strong runs. There were some weaker runs by the Stinger and Net Radar, but again even those runs gave plenty of warning time for a save.
K Band:
For K band there are more options… you can run the detectors unfiltered for max performance (which almost no one does due to BSM issues), some detectors have BSM filtering options, some have TSR filters, etc. so we’ve got a number of different charts to show different things on K band. Because there were so many filtering options for each detector, we only ran each detector twice with each filtering configuration to save time.
K Band, Filters Off:
Now first off, let’s look at raw sensitivity with every detector running with filters disabled.
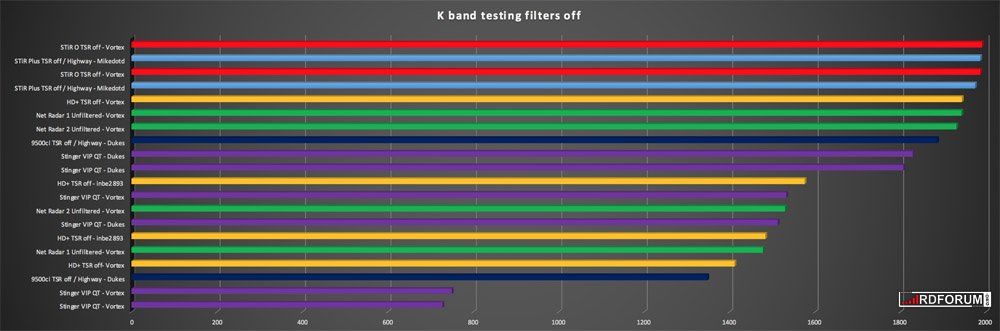
Every detector managed a strong, long distance showing here. M3’s, HD+, Net Radar, Stinger.. everyone. There were some fringe detections and some climbing the hill. You’ll see some really poor detections with the Stinger that were in the 700 ft. range, and this is the bug I was referring to that Stinger has fixed with the 4.0.32 firmware so those runs no longer apply. 🙂
K Band, BSM Filters:
Some detectors like the Net Radar offer BSM filtering options. The HD+ has TSR Low. The M3’s have TSR. The Stinger we switched to Regular mode (though people are reporting great results with QT mode). We ran every detector in Highway mode and didn’t bother testing Auto/City modes for the sake of time, plus because speed-based filters can vary up the results more.
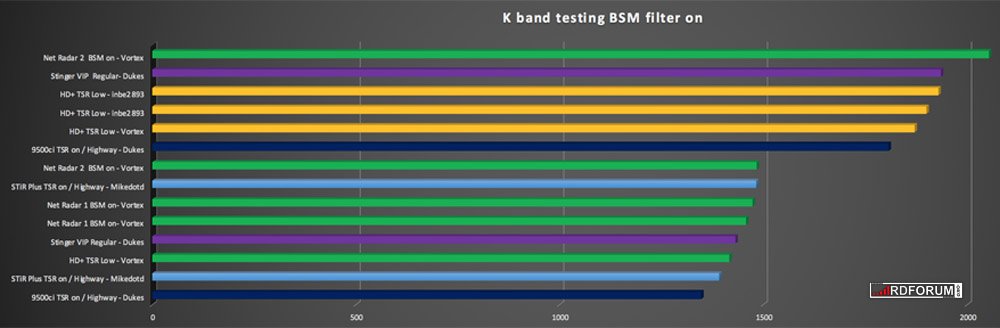
A variety of results with each detector. Most every detector had a crazy long distance run and a normal run. The HD+ did excellent with TSR Low.. oddly even better than with TSR Off. I don’t know what’s up with that, but the results are the results. 🙂 The O was not included because it doesn’t have TSR.
K Band, Full Filtering / TSR:
Switching to full filtering with the traffic filter on the Net Radar, TSR High on the HD+, still TSR for the M3’s and Regular mode for the Stinger, here’s how that looks.
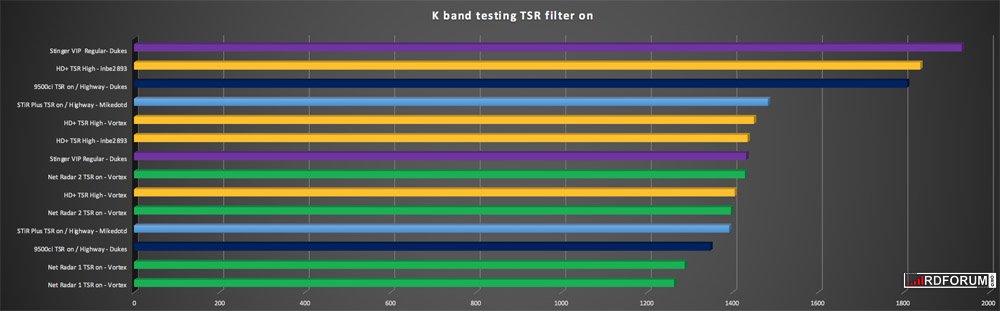
As usual, a few detectors managed extra long range detections and most alerted as we drove up or crested the main hill.
Effective BSM filtering is arguably more important than all out range. The Stinger (with 4.x.x firmware) and Net Radar are two of very best. The HD+ is pretty good too and the M3’s not so much. That said, if you’re curious about range, looks like they can all do a fine job. Let’s take a look at how each detector looks individually if we look at one detector at a time with different K band filtering settings.
Stinger VIP on K band:
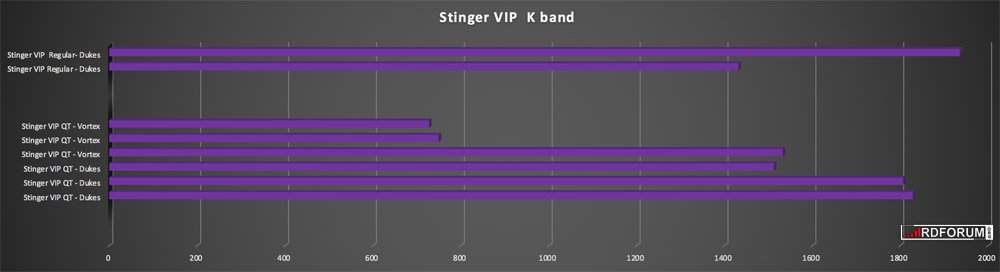
We didn’t do a whole bunch of testing with the Stinger on K band. Once we realized it was able to max out the course even in Regular Mode (most aggressive filtering option), we were pretty satisfied with just the two runs from Dukes’ VIP. Those short detections are from the now fixed bug I talked about earlier.
Net Radar on K band:
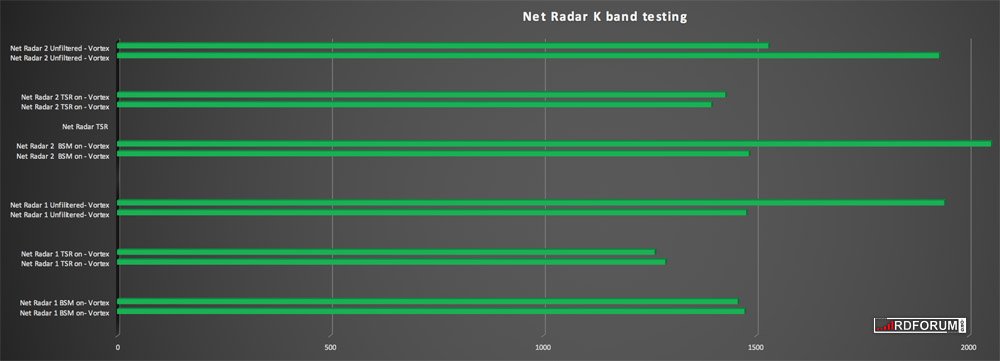
With the Net Radar what I was wondering is how much (if any) the BSM or TSR filters negatively impacts range. In this test it doesn’t look like it was a big deal. It managed a great job even with that filters enabled which is impressive. I have tested it previously and found that TSR created a pretty big range hit, but the antennas have since been updated to address this. The BSM filter looks like there’s not much of a performance penalty. TSR does introduce some as expected, but on this course at least, it’s still plenty manageable.
Radenso HD+ on K band:
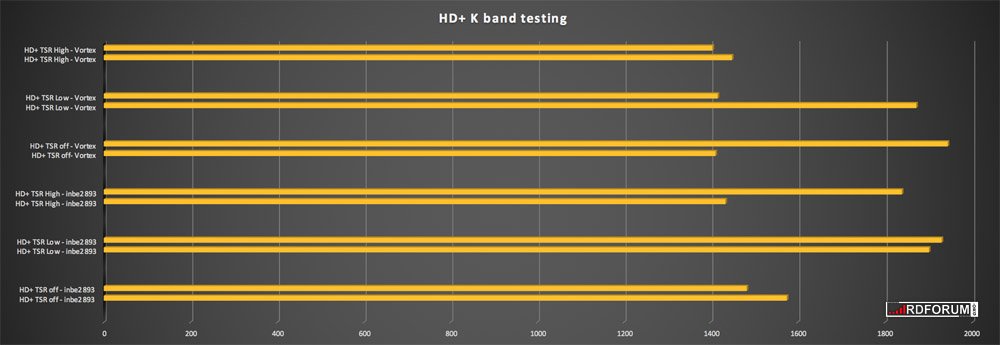
This one was really interesting… The HD+ managed some outstanding detections even with TSR Low or High enabled, even managing to sometimes outrange the detector with TSR Off. Go figure… Good job Radenso!
M3’s on K band:
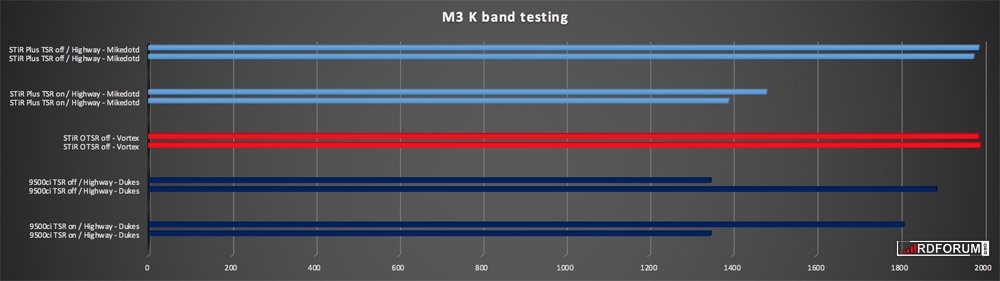
These results are a little more expected. The M3 does better with TSR Off than On. The 9500ci still managed a detection better with the filter on than off, but overall these are in line with expectations.
Testing Conditions & Traffic:
Finally, commenting on the weather conditions and traffic. We lucked out with good weather for the second and third days of testing on the main course. No rain, sunny/cloudy skies, and cold. 36 degrees the first day and 29 the second. Traffic was light but there was a little bit. Fortunately less than on the first course. Sometimes a car would pull out in front of us or a UPS truck would stop in the road ahead of us, but curiously it didn’t seem to impact results. Nevertheless, I do want to mention it because it is an uncontrolled variable.
Conclusion:
So how’d things go? Well, excellent! Every detector performed very well. We were able to get some separation between detectors. I would have liked even more separation between detectors, but we tested on two different courses and found that on both courses, every detector did great. I guess that’s what happens when you pick higher end detectors. 🙂 We had curves, hills, radar guns hiding around bends… tricky situations and yet these detectors all did awesome. I was hoping for more definitive and clear conclusions as to which ones were “better” than others, I gotta admit. 😉
The Stinger dominated on 34.7. I’d like to see that be the case across the board. The M3’s were solid, consistently being at the top of the pack, especially on Ka. The HD+ was an excellent performer and I’d run it over the O around here since I see primarily 33.8. The Net Radar generally didn’t lead the pack yet it achieved the longest run of the day (K band with BSM on).
There was some run-to-run variation and yet even in the “worse” runs, the detectors still gave plenty of time in practice. I’m sure other courses would illustrate other aspects of these detectors, but after running multiple copies of each detector against all the main radar sources you’ll see in practice (other than X band which is only in a few places), it seems like any one of these detectors would be a good choice so if choosing between these detectors, you’ll definitely want to consider other attributes like BSM filtering effectiveness, how the lockouts work, price, how automatic they are, price, and all the other attributes as well.
A big big thank you to everyone who supplied gear and especially to @Dukes for coming down and helping with this test! This is all possible thanks to you guys. 🙂
| This website contains affiliate links and I sometimes make commissions on purchases. All opinions are my own. I don’t do paid or sponsored reviews. Click here to read my affiliate disclosure. |


15 comments
Skip to comment form
Love the videos they definitely help make a knowledgeable decision of what to run.
Thank you.
Here is what I’m running into here in Michigan. The state police are almost always working quick trigger.
I have always went immediately for the longest range. Now I have to go for longest range but still have to get early warnings on quick trigger. I accomplished this with my redline and segmentation. The problem is with all of the new blind spot monitoring my k band is a constant. I believe if I enable all the filters I will loose my quick trigger alerts and be a sitting duck. To resolve this I’m running my redline with k band off and a valentine for the k band.
So what I’m looking for is what out ther picks up quick trigger ka band but still has decent filters and range?
Thank you again for such great reviews.
Can I ask if you used band segmentation on any of the units? Have a Merry Christmas And Happy New Year.
Author
You bet. I forgot to mention it but every detector was segged 2/5/8.
Can I asked if you figured out any settings with the remote units like m3 stri plus and 9500ci that increase the range a lot? I’m running x off k on sws off tsr off rdr off highway and 2,5,8. Anything else I can do?
Author
The M3’s are all universal in that respect. RDR off, segmented 2/5/8. TSR On and Auto mode will help for K band falsing, but TSR Off and Highway is for maximum performance. Remember, those are simply M3’s in a remote shell, plus the add GPS. Otherwise all the stuff with the Redline and Magnum is applicable for the remotes too.
Author
The M3’s are all universal in that respect. RDR off, segmented 2/5/8. TSR On and Auto mode will help for K band falsing, but TSR Off and Highway is for maximum performance. Remember, those are simply M3’s in a remote shell, plus the add GPS. Otherwise all the stuff with the Redline and Magnum is applicable for the remotes too.
Nice job!
87GN
Thanks so much for this work! Replicated runs, going through the effort to have “replicates” of the different detectors – putting in the effort to run a really sound trial is fantastic. Just wanted say that the scientists out here in lurker-world appreciate good work like this.
I also wanted to say that I really appreciate the effort and attention to detail that you put into presenting the results with such clarity. It’s the little things, like keeping the colors consistent for the same detectors from graph to graph and retaining the same axis scaling across like graphs. Bravo and thanks again!
I am looking for a radar detector for my 2006 Corvette Z06. There is very little room on the dash board or instrument panel. I drive mostly in the Las Vegas area and am looking for a top of the line detector. From all your videos, it appears that the Radenso XP would be a likely choice but I like the size of Radenso Pro SE. I just don’t want the detector going off all the time with false alerts and not being able to lock them out. My other likely choice from your videos is the Net Radar. I’m confused though with what monitor is used for this, the iPhone? What does the setup look like in a Vet. Do you have any pictures of what it would look like. Thanks for all the information you’ve posted.
Doug
I am debating between a Net Radar and a K40. Can you provide some insight between them?
Many thanks!
Author
So in general the K40 is an overpriced underperformer. They’re not great performing detectors but they’re solid with nice markups for the installers so you’ll find them pushed for that reason quite a bit.
The NR is a great option with excellent filtering and pairs with the ALP which is significantly more effective against laser so I’d definitely suggest the ALP/NR route over the K40.
Hi I bought the stinger vip . Nothing but false alerts and never filters out fixed position alerts goes off just the same every day as I drive by them I did the first update and now I just give up it’s sitting in a box $2500 for a $200 detector not very happy . But I have to say the customer service is the best in the world he answers the phone every time .
Author
How do you have your detector set? I’m running at Regular and Alert Bias at -2 and that helps with many falses, along with the low speed muting. For the lockouts, I’m also finding that with the latest firmware, I have to manually lock out signals (autolockouts aren’t working) and even then, I’ll sometimes get alerted to a previously locked out signal. Hopefully Stinger will get on the ball regarding their firmware updates and nail down these issues in software.
I have played with it for a year I just thought spending $2500 would put me in a position obove all the bs but for the first time buying the best terned out to be the wrong thing to do I think I am going the buy a R3 and see how I like it.
Author
Yeah honestly I think the R3 is really just the way to go nowadays. I’m not gonna tell you that it’s perfect for everyone in every situation of course, but it’s an excellent detector that only continues to get better.