So the Max360 is Escort’s latest and greatest, newest radar detector with all the bells and whistles, including arrows! It takes their previous best selling radar detector, the Max2, and gives it a second antenna pointing backwards so that it can have arrows just like the V1, and now you have an automatic, plug-and-play, ease to use radar detector that can do it all for you without minimal setup, no extra accessories required, and it’s now basically like the jack of all trades. The Max360’s abundance of useful features and convenient user experience has made it one of the most popular radar detectors on the market for the everyday driver. Let’s take a look through this Escort Max360 review and find out if it’s the best radar detector for you too. (Updated November 2017)
![]()
Escort Max360 Review
So the video I posted up above is the short version of my video review that covers the highlights. If you’d like to watch a comprehensive and in depth video review, here’s the full version that’s just over an hour long.
Escort Max360 Radar Detector Overview
The Max360 is Escort’s first detector with arrows. The V1 has had this feature for nearly 3 decades now, but their patent for arrows expired back in 2012 and so now Escort is introducing this same feature to close the gap and remove the V1’s primary competitive advantage. It is essentially a Max2 with a rear antenna to give it arrows to make it more like a V1, and they’ve also copied a few other small things that the V1 does to close the gap. They’ve also improved upon a couple things the V1 does while in other ways it’s not as refined as the V1, so there’s a mix of good and bad. There’s also been some welcome improvements beyond what we had with the Max2, so it’s more than just arrows. The detector is also pretty large and heavy (the largest and heaviest on the market) though that doesn’t seem to be a big deal once it’s actually on my windshield.

Would I recommend it? Yes, but like with any detector, it’s not going to be the best choice for everyone. Depending on your needs, where you drive, and even your personality and preferences, the Max360 may be the perfect choice or perhaps another detector may be better suited to you. So let’s dive deeper into this Escort Max360 review and take a look at some of the specifics to get a better feel for how this detector fares.
Max360’s Performance
This is arguably one of the most important attributes of a radar detector. Performance. The better it can detect radar and warn you of threats in the area, the more likely it is to save you from a speeding ticket.
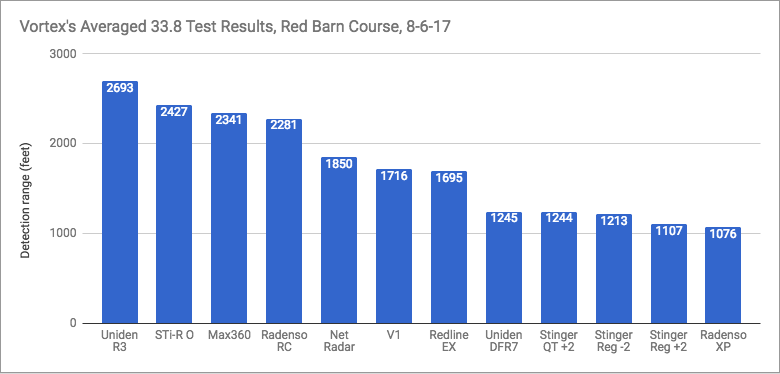
This detector will give you the same level of performance as the Max/Max2. I’ve found the Max360 to consistently be a standout performer on 33.8, the main Ka band frequency I see around here, so I’m very happy about this.
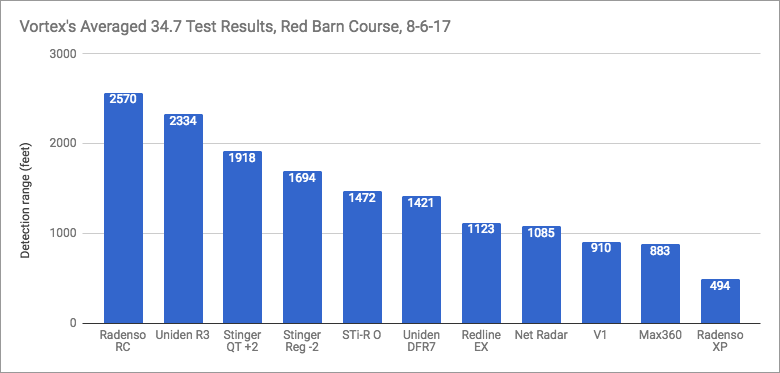
On other frequencies such as 34.7, it’s less of a standout performer.
Many others have tested their Max360 over the years and have found similar results. The Max360 isn’t necessarily the best performing radar detector ever, but it can still provide sufficient range in most every situation which is what a radar detector needs to do to keep you protected.


The MWCTG tested the Max360 and it gave plenty of warning time, but it got beat by the other detectors the tested with including the Redline, STi-R O, and Stinger VIP.
So while it may not be the range king on all bands against all guns, it will still do the job. Here’s a very good real world detection against I/O 35.5. It has no problem here and should be adequate in many situations for you too.
I’ve also done some basic QT testing and it seems to be a pretty quick detector. A custom swept V1 and BS/RDR Redline are both faster, but the DSP definitely helps speed things up with making the detector fast without having to rely on disabling some of the Ka filters or cutting out some of Ka band and potentially missing an out of tune gun which is something I really like. That’s one of the benefits of a digital detector: being able to scan a wide range of frequencies while still maintaining good performance.
Max360’s False Filtering
Along with radar detection performance, the ability to filter out false alerts is also vitally important. Who cares if you have awesome performance if you’re getting endless false alerts, begin tuning out your detector, and you stop paying attention to the alerts that it’s giving you?
The Max360’s implementation of GPS lockouts is the easiest to use out of any brand. Unlike some other detectors from Radenso or Uniden, Escort’s lockouts are automatic (thanks to a patent that’s good through 2020). Just drive around and it does it all for you without you having to press a button to lock a signal out. Unlike the V1 which can also do autolockouts so long as you pair it with your phone, the Max360 doesn’t require additional dongles, a phone to make it happen, or setting up and running any third party apps. It’s the most convenient way of doing it and I like that. No phone required. For you guys who want a convenient experience, the Max360 delivers. It’s also easier to move from car to car when all you need is a detector and a power cable.
The blind spot filtering has been improved relative to previous detectors. There’s now some CAS filtering that’s built in (that you can’t turn on or off) that lets it filter out some blind spot cars without having to enable TSR and accept the performance penalty that TSR brings. Very impressive stuff. The false filtering isn’t perfect by any means and no detector is. You’ll still get falses. It’s not magic. However, it is one of the best BSM filtering detectors available on the market today.
As for TSR, the delay has been reduced from what we saw with the Max2 so there’s no longer a crazy long delay when the filter is enabled. A very nice improvement and it means you’re less likely to miss a brief burst of K band radar should you need to have TSR enabled.
You’ve also got cruise alert to mute signals when you’re below a set speed which is handy for quieting the detector down around town, especially in new and unfamiliar areas where the lockouts haven’t kicked in yet. Additionally, if you pair your detector with your phone, you can get speed limit information for the road you’re on and the cruise alert threshold gets replaced with the speed limit and so the detector will mute signals when you’re traveling below the speed limit. Sounds good in theory, but there’s some issues with doing this (what if you’re in a construction zone or the speed limit information is wrong?) which I’ll take about in the section below about bugs and improvements I’d like to see with the 360.
Display
One thing that’s pretty awesome about the Max360 is that the screen can display arrows, frequency information, as well as signal strength for front and rear. You get a ton of useful information on the display itself.
The display is also very customizable. There’s 7 different ways of displaying signal strength and 3 different ways of displaying the arrows. You can customize the colors of the display and arrows as well to match your vehicle’s interior or to differentiate between front/rear, different bands, etc. With the V1 all the LED’s are red which makes things harder to ID quickly. With the 360 you can make things different colors which makes it easier to quickly identify things at a glance. Very handy.
I also like that you can have frequency information for the primary threat right on the detector. You can do this with a phone with the V1 and you can get the frequency for every single signal if you go that route, but for a detector that doesn’t require a phone, the Max360’s display presents more useful information than the V1.
Arrows
So yeah, it’s got arrows like the V1. The arrows are smaller than the V1, but they’re plenty bright and there’s no issue seeing them in practice. They do operate a little differently than the V1 so we’ll talk about these in a little more detail since that’s the big change with the 360.
There’s 3 different ways to display the arrows:
1) Single arrow: The arrows will point to whatever the primary threat is
2) Multiple arrows: The arrows can point to multiple signals, a primary and secondary signal. The arrow for the primary threat will blink (ie. Ka band ahead over K band behind) like the V1 to help make things clearer.
3) Band mode: The colors for the arrows are fixed depending on the band. Laser and Ka are red, K is blue, X is green. You can watch the video I posted above for more info and to see this all in action.
The arrows are also a little more laggy than the V1. The V1 is super quick at flipping from front to rear which makes it easier to tell when you pass a source.
On average it takes about 4 seconds for the arrows to change directions when you pass a source. Here’s a comparison with the V1 and Max360.
Sometimes it takes much longer than that. Here’s an example passing a K band speed sign where it takes closer to 8 seconds.
Again, this isn’t always the case. Here’s an example where I found an Acura MDX (which makes just about every detector false to K band) where I did a little blind spot testing. You’ll see TSR doesn’t help deal with the false. Anyways, when I pass the Acura towards the end of the video, you’ll see the arrows flip from front to rear pretty quickly. This is one example where the arrows are very helpful. They can help confirm that the K band false you’re seeing is a blind spot false and not an I/O shot up ahead.
So the arrows aren’t as refined as the V1, but hey, Valentine has had 30 years to fine tune their arrows. Escort has been working on this for just a few years. Initially the arrows were slow and laggy, especially when you passed the source, but this has been improved since the 360’s initial release thanks to firmware updates.
If you pick up a Max360, make sure you update the 360 to the latest version. You can also periodically update the detector as the RLC database is updated, or if you have your detector paired with Escort Live, you’ll always get the latest information from the cloud to your phone (but not permanently downloaded to your detector).
Bugs & Improvements to be Made
The Max360 has had a variety of issues initially, but Escort has been continually updating the detector, something I’ve been covering over the years on my YouTube channel.
One improvement I’d like to see Escort make that they haven’t already has to do with Cruise Alert / Escort Live. The issue is that if you pair your detector with Escort Live which gives you speed limit information, if you also have Cruise Alert enabled on your detector to mute signals out at low speeds, the detector will ignore your Cruise Alert speed threshold and instead use the Speed Limit speed which means that the detector will be muted if you’re traveling below (what the detector thinks is) the speed limit. While the speed limit is fairly accurate in my experience (it wasn’t originally and Escort switched speed limit database providers which improved this), it doesn’t take into account things like school zones or construction zones which means that you very well may run into an issue where you’re traveling over the speed limit and the detector decides it should mute itself in an area where police like to patrol. Not cool. There’s no way to disable this if you’re running both Cruise Alert and Escort Live simultaneously. You have to either disable Escort Live or disable Cruise Alert. Running one or the other is fine, but running both creates this issue. Escort knows about this and designed it this way. I don’t like it and wish there was a way you could disable this and still use both features. You can see this illustrated in this video.
The latest firmware for the Max360 (1.3 / 1.6) improved the BSM filtering, but people are noticing that the detector sometimes locks up when detecting K band signals. The alert will get stuck on screen and you have to power cycle the detector to get it to resume detecting and alerting normally.
Escort Live also doesn’t support arrows. The third party Android app Escargot Drive can display the Max360’s arrows on your phone’s screen so the detector is already communicating arrow information via Bluetooth. However, Escort has not decided to update their own app Escort Live to display the information that the detector is already making available. I’m not sure why, but that’s a bizarre choice. (Escort Live support has never been their strong suit.. in fact they have said on multiple occasions that they’re a hardware company, not a software company, when people ask about Live integration.)
Finally, Escort is becoming more and more oppositional towards its customers these days, particularly on their forums where people report issues. Escort’s attitude has upset many of its customers with their approach and this also may very well impact them taking issues and bugs seriously and implementing important fixes.
Red Light Cameras & Speed Cameras
One thing that’s great about the 360 is that it has a database built in for red light cameras and speed cameras. No additional apps required. It also has one of the best databases on the market. It’s accurate, updated pretty frequently, and it’s also directional meaning that if an intersection is enforced in one direction of travel but not another, you’ll only get alerted if the RLC’s are monitoring the direction you’re driving. This means you’ll get fewer false alerts than with other solutions that alert you when you approach the area independent of direction, but it also means that people sometimes wonder why they go through a RLC intersection and their detector doesn’t go off. 😉
One thing that I would like to see Escort improve on is not alerting you to RLC’s and speedcams when you’re driving down the highway and there’s one on a nearby or parallel street. The detector doesn’t know if you’re on the highway or traveling down city streets and so you will get unneeded RLC alerts when driving down the highway in cities. Some detectors (like the Radenso Pro M-edition and Uniden R3) allow you to delete individual RLC’s as desired, but the Max360 doesn’t. Another solution to this would be to add mapping information into the database rather than just locations and direction of travel, but this would likely make the database gigabytes to download and require a lot more memory in the detector and Escort (or any other RD manufacturer for that matter) hasn’t expressed interest in this approach so they all have the same issue. Being able to manually delete RLC’s would be a nice feature.
If you run Waze on your phone (and you should), it also has an excellent database, it’s updated regularly, it’s directional like Escort’s implementation, it’s totally free, and it takes into account city streets vs. highways so you do get fewer falses.
So little annoyances like that aside, Escort’s RLC alerts are actually pretty good. Sure you can get a better running package overall if you piecemeal other apps in like Waze, but again the Max detectors are designed to be your do-it-all detectors that don’t require
Size
Size-wise, the detector is huge. Not absurdly huge to the point of ridiculousness, but it’s definitely the biggest detector out there. It’s also heavy at nearly 3/4 of a pound.
Is this an issue in practice? Not as much as I thought.
Even in my car which is a compact Miata, it doesn’t block as much of my visibility as I thought it would. It’s still usable even when mounted high by the RVM.

It does block more of my visibility than my V1, and that’s something that I am seeing to be a bit of an issue when driving around with it, but that’s more due to the fact that the sticky cup drops it down and I can’t mount it flush with the top of my car. Also because of the fact that the mount is in the rear of the detector rather than the middle, it sticks out forward which gets in the way of seeing my RVM. The solution is to move it over to the left a little bit so it’s more in front of me instead of slightly off to the side by the RVM. I wish the factory mount would let me mount the detector higher so it didn’t dip down into my vision, obscuring my view of the road as much.


Mount
The previous Max’s were known for being kinda bouncy on the sticky cup. There was an update that fixed this to a certain extent, but there’s a newly redesigned sticky cup that the Max360 comes with that effectively solves this issue entirely. It uses a shorter connector with less leverage against the mount. The Max360 is solid and stable now, despite its size and weight, and it’s nice to have the detector actually be fixed on the windshield. No more bounciness! Yay!!

Original Max sticky cup (left) and updated Max sticky cup (right)
The sticky cup is also compatible with the Max/Max2/GT-7 as well so if you’re upgrading from a previous gen Max, your current sticky cup will work with the 360.
There were some quality controls issues initially with sticky cups exploding, but Escort has since updated the internals of the mount to fix this issue. They have replaced the mounts with updated models and new detectors are all shipping with good mounts so this issue has been resolved.
The main thing is that I wish the mount wasn’t so big and didn’t make the detector hang down so low and block as much of my visibility. Aftermarket mounts are available as well and depending on your vehicle and placement location, this may not be an issue for you in your vehicle. If you prefer not having anything attached to your windshield at all, you can also consider the Blendmount which works great with the Max360.
Improvements over the Max2
So in addition to the arrows, new display options, improved blind spot filtering, reduced TSR delay, and less bouncy sticky cup, there’s even more improvements to the Max360 over the Max2.
The case design is different so we shouldn’t have issues with the Max360 splitting in half, removable panels falling off, or lens falling out. It feels much more solid which is a very good thing.
There’s also a really high pitched annoying beep when the detector starts up or when you go into the settings. After the initial warnings (ie. X band off, TSR off, etc.), there’s a high pitched beep with the Max2. Very annoying if you had your detector volume up from a noisy car the night before and then you start up the next day in a quiet parking lot. That chirp can be kinda ear piercing. That has been changed now to where it’s all a lower pitched beep which is much more pleasant to use in practice.
All in all, it’s a more enjoyable package to use. They’re small things, but the improved build quality, reduced annoyances, no more bounciness, no more crazy long TSR penalty etc. all add up to be a more enjoyable package and I like it more than the Max2. It’s more than just arrows. There’s been a few other improvements too that they’ve practically copied from the V1.
Max360 Compared to Valentine One / YaV1
So I’ve gone over the arrows stuff already. I like that there’s more customization and colors offered with the Max360. You get much more information on the Max360 display (ie. frequency display) and you can display the signal strength for two signals at once (front and rear). With the V1 you only get signal strength about one signal. However, if you pair your V1 with YaV1, you can get the arrows, band, frequency, and signal strength for every single signal. So you get more info with the V1/YaV1 over the Max360, but the 360 has more info than the V1 on its own.
They’ve also added a bogey counter to the 360, just like the V1, so you can be aware of how many signals the detector is picking up on.
The V1 has two volume controls, the main volume and the muted volume. They’ve sorta copied this with the 360. AutoMute now has 4 different options: High, Medium, Low, and Off. Now you have the option of how far AutoMute drops the volume… so if you want the automuted volume to be louder or quieter, you have more control over how loud or quiet it gets. Not quite as easy to use as the V1 with its physical dial right on the front, but definitely a welcomed improvement.
There’s also a V1-like new bogey tone that you can activate. Under tones there’s Standard (traditional beeps), Standard+ (traditional beeps with a new bogey tone), and Mild (which is like a calm doorbell). Here’s an example of Standard+ in action passing by one auto door opener. As I pass it, the arrows flip from front to rear. The 360 then picks up a new K band signal from the door opener a block up the street, you get a beep, and the front arrow lights back up.
It’s not exactly the same as the V1. They have different alert priorities. You don’t get a new bogey sound if you first have a Ka alert then get a K band alert, or if you have a K band alert then get a Ka band alert. With the 360, they have to be the same priority in a sense.
So there’s a bunch of little things that they’ve copied. Imitation is the highest form of flattery, I suppose. 😀 It’s also taking away, to a certain extent, the competitive advantage of the V1 over the Max detectors, and I think that’s a big part of what Escort was going for with the 360.
So new colors, they’ve copied some features, and they’ve improved on some things, but the V1 still feels more responsive and refined because alerts display instantly and arrows change directions to follow the signals almost instantly too. The 360 feels like a bit of a “me too,” but that’s okay. I’m hoping Escort continues to tweak and improve the detector to close the gap even further.
Driving around town, I’m liking the quietness of the GPS lockouts as well. YaV1’s lockouts are safer and more sophisticated, but they are a bit noisier because they’re much more geared towards avoiding locking out a legitimate threat. Escort’s lockouts are simpler and the err on the side of quietness.
YaV1 does a lot more analysis to help avoid locking out a legitimate threat. While both implementations look at the location and frequency of the signal to create a lockout, YaV1 looks at things like the direction of travel (the 360 doesn’t) which means locking out a signal when driving in one direction is independent of a lockout traveling the other direction. It also will alert to an additional signal with a similar frequency while Escort’s implementation will lockout any and every signal with a similar frequency.
YaV1 errs on the side of safety at the expense of chattiness and taking longer to lock a signal out. Escort’s implementation errs on the side of quietness and makes it easier to use at the expense of being more likely to lock out a legitimate signal.
I also like that because the 360 does it all itself, every lockout is muted immediately. With YaV1 there’s a bit of a delay between when the detector goes off (immediately), the signal is passed onto the app, the app does its muting processing, and then it tells the detector to mute. So with YaV1, you’ll always get an initial beep, but it’ll mute by the second beep. That’s good if you want to be kept aware of what’s going on around you, but it can be annoying if you want a quieter experience and only want to be alerted when there’s a new threat in the area. I like both implementations for different reasons. Sometimes I want to know everything that’s going around me. Sometimes I want a more relaxed experience and to focus on other things.
So I think the V1 with YaV1 is a little more refined. You get safer lockouts, arrows are far more immediate and responsive, you get more information on screen, all the information about every single signal versus just the primary and secondary signals (sometimes people just want a simpler experience too which is also cool), more advanced muting options, frequency announcements are possible, you can easily create and switch between settings profiles on the fly, etc., but the 360 offers much more as a standalone option if you don’t add YaV1 into the picture and you don’t have to go through the effort of setting up an app to get the full functionality.
The 360 has bluetooth built in so you don’t have to purchase and add on an external bluetooth dongle and the 360 is cross-platform capable so it works with both Android and iOS while on the V1 you have to purchase an iOS or Android specific BT module. The V1 requires third party apps like YaV1 for Android and V1Driver for iOS, as well as some advanced configuration. On the Max360, you don’t have to dive into more advanced programming options like custom sweeps to derive maximum performance from the unit at the risk of potentially not alerting to out of tune guns, and the general idea is you can get many of the same features and abilities in an all-in-one easy to use package.

Is It Worth it?
I think the Max360 is a great option for people who want all the bells and whistles and also want something easy to use that does everything for you. It’s especially good for people who want both all the bells and whistles while also having a user friendly experience. It’s not the cheapest or the smallest detector in the world. In fact it’s the largest and the most expensive. However, you get a whole lot of useful features and usability for your money and that’s what it’s all about.
You can save some cash by going with a V1 with V1Driver or YaV1, but that’s a more complicated setup with more components and a third party app to build up and run together. The integration and ease of use is a big selling point for the Max360. It’s the best radar detector for the masses who want an easy to use package, especially if they don’t know much about radar detectors in general but still want all the bells and whistles.
Even if you like a more advanced experience and more fine tuned control over the nuances like I do, there’s really something to be said for taking a break from things sometimes and having things just work without having to focus on things, use so much brainpower, and remember to plug in additional accessories like cell phones. Everything just kinda works on its own and that’s pretty refreshing sometimes.
Buying a Max360
Buying from Amazon: If you want a Max360, there’s two ways I’d recommend getting it. The standard way is to buy the Max360 from Amazon. You’ll typically get it discounted and pay less than full retail. Just be sure that you buy it directly from Amazon and not from a third party seller, this way you get a warranty from Escort. Make sure that it says “Ships from and sold by Amazon.com” when you buy.
![]()
Buying direct from Escort: The second option is to buy the Max360 direct from Escort. You’ll pay the full retail price of $649 $499, but the benefit is that you’ll get a speeding ticket guarantee meaning that if you get a radar or laser ticket in the first year of ownership while running the Max360, Escort will cover the ticket. Some restrictions apply and they don’t also cover any insurance premium hikes or points to your license, but this additional layer of protection in case you get a ticket may offer some additional peace of mind. It’s up to you which way you want to go. Click here to buy the Max360 direct from Escort with the speeding ticket guarantee.
Full Disclosure
I’ve tested multiple Max360’s so far. All were retail units. The first one was one of the first production units that RDF member @dcpatters sent me. He purchased a detector and sent it to me unopened for testing. Thank you! I’ve purchased a Max360 retail myself and have been running it for years. I’ve also had a chance to test other people’s 360’s as well. The links in this review are affiliate links so I do make a percentage if you buy, but I haven’t been compensated in any way for this review and as always, whether or not money is involved, I make a point to give you my objective and unbiased review of every detector, both the good and bad, so you can make an informed decision. Thank you for reading my Escort Max360 review!
| This website contains affiliate links and I sometimes make commissions on purchases. All opinions are my own. I don’t do paid or sponsored reviews. Click here to read my affiliate disclosure. |



33 comments
Skip to comment form
Hello vortex radar!
I hope you can help me out of this case.
I purchased a escort max360 last week from the radarbuster.com
Before I purchased it. I watched every single reviews and your videos on YouTube channel that said pretty good about it. ( I’m student so that was a lot of money to get the escort max360)lol
And over 1 week of using, it works well but but yesterday I’m almost ticketed by a hidden cop. And the road like down hill and extremely straight. I didn’t see him, cuz I was behind two other cars. I think they saw him so that’s why they slowed down => I didn’t get ticket because of them ( thanks a lot!). But the only problem I’m really really disappointed that the radar detector didn’t detect me even I went through. I saw the police with the laser gun or something (I don’t know what kind of it) he pointed at me. But I slowed down because of cars at front of me. And i do setup laser protect on it. I was so much upset at that time. Then I sent a email with my problem to the radarbuster and they just sent me a email it says ” Thank you for your recent purchase! As we appreciate your business and value your satisfaction, please take a moment to visit the link below to submit feedback on all items in your order:” . They don’t help me out. LOL. But I believe that you can do or make a video, and what kind of lasers or radar it can detect or not. Thank you so much!
Author
Glad to hear you didn’t get a ticket!
If you’ve got laser in use in your area, a radar detector won’t help as you’ve found. Even if it does go off, he’s already got your speed.
Against laser you’ll need a good set of jammers like the AntiLaser Priority which I talk about on my site.
I know you’re on a budget so you can consider swapping out the Max360 for a Uniden LRD950 (no arrows but better performance and false alert filtering at a much lower price) and using that extra money towards jammers.
You can also run Waze on your phone which is free. If someone reported the officer who was sitting there shooting laser, the app would tell you.
This video will help provide more information: https://youtu.be/5lOiMzmgVnU
Thanks for your response!
But the problem I couldn’t put laser jammer because of two reasons that are expensive and I live in TN. I would buy a redline but for pleasure I chose max360. I’m using iPhone which is I don’t have the app escargot drive so I can’t run both of escort live and waze which is I have in my phone already.
Author
Yeah I get that they’re pricey. Unfortunately you have to pay to play… If you’re gonna push the limits, you gotta pay for CM’s or speeding tickets… and even then you can avoid tickets entirely. If jammers are illegal, if you use them properly, you’ll be okay. Additionally, speeding is illegal too and the penalties are far worse so as long as you use your jammers properly… See here: https://www.vortexradar.com/2016/01/alp-setup-guide-part-9-using-your-laser-jammers/
Escort Live actually works better on iPhone than it does on Android and you can run Waze and Live at the same time. The background alerts work well so that’s a good choice.
Thanks for the ideas! ????
Actually I’m not speeder but it just keeps me more interested than just drive. I watched your YouTube channel for expansion so that’s pretty cool.
I’m still confused about the lasers and detector. Radarbuster they told me that every detector can detect every laser beam. But laser beam must strike the detector for it to detect and alert to it.
My max360 kinda like v1 has a lot of false alerts when I use the highway setting. Does it automatically lock out when we don’t use escort live?. My friend has a escort 9500xi which is not as good as max360, we tested on the same road at the same time. And my max360 has like 5 or 6 false alerts but the other not. I’ll try to test my radar to the laser to see how it works or how far can it pick up the laser but I don’t have lasers gun. I just want more experience about the radar detector.:)). I Hope you can make more videos about it. ” learn something new everyday!”.
Author
Every radar detector can technically detect laser, yes, but only if they’re sensitive enough and they don’t filter out that specific pulse pattern. Many detectors may not even see the signal at all if they’re aiming at close range and the beam isn’t up towards the radar detector.
Your Max360 will automatically learn and lockout stationary alerts that it sees over and over again. It won’t help for blind spot falses since those are different every time you drive.
I love that you’re taking the time to learn and figure out how stuff works! That’s exactly what I’m doing too. 😉
Thanks for this incredibly informative article. I already owned a Valentine 1 but wound up purchasing an Escort 360 on the basis of this article. My wife has the Valentine in her car and I have the Escort in mine for now. One thing I was hoping you can help me out with is the red light alerts. I would like to retain the warning display on the screen of the Escort 360 but not have any audio alert. In an attempt to accomplish this, I have set the Alert Settings for Red-Light Cameras in the Escort Live app so that Sounds are Off. However, the Escort 360 still keeps talking to me (very loudly) every time I approach an intersection with a red light camera.
If silencing the red light camera alerts isn’t possible, then can I turn off the red light camera notifications completely? Thanks.
Author
haha yeah, I don’t think there’s a way to separate audio/visual alerts. They’re either on/off.
Hi,
Can I set the BEL Magnum for the ‘Extended Distance’ like the Redline radar detector XR ?
Shiri
Author
You bet. The “Redline XR” is a somewhat misleading marketing gimmick and all it means is that you disable RDR and enable Ka segmentation, a feature that Escort/Beltronics has made available on both detectors.
Thanks…..
Another question, I don’t have a cell phone that has data/Internet service, just a ‘Flip Phone’. Can I still use the detectors that uses phones for updates? I’m kinda backward and slow.
Author
It needs to be a modern iPhone or Android with data service to connect to your detector.
Sorry, forgot to ask if I can use my computer to update a detector?
Shiri
Author
Yes that’s how you do it. Here’s a quick demo with the Beltronics GT-7, but it’s the same with Escort’s other detectors: https://www.youtube.com/watch?v=QVj8f6ASgnk
Thanks for your help…
Shiri
Question for VortexRadar. If say for someone who really doesn’t want to spend money on Jammer as they are super expensive. Would it be wise to say this: If you are a loner on the road, do not rely on your radar detector but if the road was somewhat busy then it is pretty safe that other will be targeted first, therefore your detector will warn you long before you are within ticketing range be it Laser or Radar?
Also please, please even though I don’t want Jammer but I can spend enough to buy two radar detector, would it be a waste of money to put one in the front and one in the back? Any benefit to doing this setup? Thanks in advance!
Author
When it comes to radar, yeah you’ll probably get a warning ahead of time. Many people even do that intentionally. It’s called having a rabbit where someone ahead of you will draw the shot and your radar detector will go off before it’s your turn to be clocked. With laser, on the other hand, you don’t have that luxury. By the time your detector goes off (and it may not at all because the laser beam is so small), your speed is already acquired and you’re toast.
You could put a second radar detector out back but honestly I think it’s kind of a waste of money. If you want to do that, get one detector with two antennas that’s designed to do that so you’ll have arrows. Rear detection isn’t a huge deal. It’s knowing the direction that’s the main benefit of having a second rear facing antenna.
If you’re looking to save some money, start by running Waze to help with laser. People will mark where police officers are sitting and hiding and often times that’ll save you too. This is especially nice since they have to be stationary when running laser. However, this won’t help you if they’re not yet marked, if it’s night and they’re hard to spot, if they’re hiding, or anything like that. It’s a great option to help lean the odds in your favor a little bit while you’re saving up to get proper protection.
Hey Vortex
2questions
1. Have you noticed a significant change with the new firmware update re BSM false alerts thus far?
2. If mounting the detector up high as you do with your V1 in your video are u still able to use the sun visor?
Thank u in advance!
Author
I haven’t tested it myself yet (I’ll get a chance this weekend), but the resounding consensus is that it’s extremely effective. This right here may have pushed the Max360 over the edge to make it the best RD on the market.
As for mounting up high, any RD I mount there prevents me from using my sunvisor. I’m considering using my Blendmount actually to help avoid this issue.
Thanks much
You post excellent and informative videos!
Thanks again
Been driving around town and seems significantly quieter thus far!!!
Is there a list of states that use traffic sensors??
Hey Vortex
Since updating my max 360 and switching to Highway mode with TSR OFF, I get a message on my detector each time it starts up that says “band enables modified”. Is that normal function? Is it due to TSR being off?? If it is normal function is there a way to get rid of it?-thx
Author
That’s normal now if you have any bands or TSR disabled.
just curious–how much of a decrease in performance in Highway mode with TSR enabled?-
Hey Vortex
Thoughts on performance between Redline EX that is segmented as you recommend vs Max 360?? Still having a hard time deciding between the two-thx
Author
For most people the Max360 will be a better choice. Unlike the original Redline, the Redline EX doesn’t hold a big lead over the Max360, even while segmented. Heck, my 360 outperforms my Redline EX on 33.8… Crazy. Check out my recent video on the subject. https://youtu.be/nu4Lp6uwNq0
Thanks as always—-looks like overall the R3 has best range but not thrilled with its mount and I prefer auto GPS lock outs. Really like the mount for EX but as per your recommendation I think I will send it back and go with the best “plug and play” out there-M 360. Hoping there will be a firmware update enhancing it performance!
I have had a very negative experience with this radar unit. First let me say that my wife while using the unit, received a speeding ticket that cost (fine) $288. Escort received all information and denied reimbursement as per their advertised responsibility. They conducted NO investigation and their conclusions were completely wrong. They have refused to investigate despite addition information we developed from the police officer who issued the ticket. In addition, they have been nonresponsive to our calls and email. This is the worst Customer Service Dept I have ever dealt with. The unit does not detect radar. It is too heavy and will not stay properly on window stand. I do not recommend this unit.
Author
Yikes. What was their reason for declining the reimbursement? There are some conditions that you have to meet and there are reasons that they’ll deny it. Did any of exceptions apply to you?
What does the voice command say when you go over the speed limit?? Does it say over speed or reduce speed???
is this RD still relevant or do I need to upgrade?
Author
It’s still a fine choice, yeah